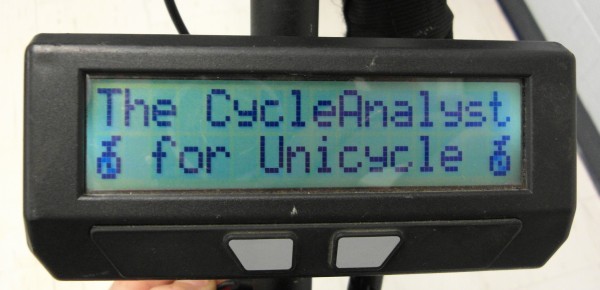
For the control interface and display, I’ve been working on a custom firmware build for the Cycle Analyst specifically for this project. One of the fun features is that since the Cycle Analyst knows both the riders pedal cadence from the idler magnet, and the wheel speed from the motor hall sensors, it is able to compute and show in real time the equivalent gear inches of the wheel as you shift the nuvinci up and down. So you can see that in the bottom right hand field where it shows 49 inches. Geared all the way up it would be at 64-65", while geared down it would read about 35".
This is useful with the continuous transmission hub since otherwise there is no easy way to be sure just what gearing you are in. There is some visual cue from the nuvinci grip shifter, but it’s pretty qualitative.
Oh really, what kind of distances? and I presume you are feathering the brake at all times? I heard that there was a freewheeling muni that was around at the downhill event but I didn’t get a chance to see or test it.
As to your question, yes a freewheeling version would be much easier to build, and it would be pretty trivial to remove the one way clutch in this current project and allow the nuvinci hub to freewheel. Then the wheel wouldn’t lock rotating backwards and it would also enable the full 360% gear range of the hub, meaning rather than topping out at ~64 inches it could go right up to like 110inch wheel size. But I wanted to do this only after sorting out automatic electronic braking via the motor, as discussed in this post.
OK wow, just had a look through of our discussion thread and videos on this topic and I am thoroughly impressed. As someone who can’t even glide let alone coast any distance, I wouldn’t be the best test subject for this but I’d sure be happy to see someone give it a go.
It would be quite trivial for me to revive the old 3-speed S3X project and replace the S3X hub with like a Shimano alphine 11 or similar. Then you’d have a fairly lightweight freewheeling unicycle with a pretty crazy 400% overall gear range. And since backlash isn’t a concern at all, we could use much smaller diameter sprockets going up and down to the transmission hub which would keep the look clean too.
If you can pull this off and ride long duration with confidence on a freewheeling unicycle then I dare say you could be up for a huge advantage at any of the distance events at the next Unicon!
Since January I’ve put in nearly 1070 freewheel miles, mostly on trails. My latest focus has been pump tracks but I’ve also recently starting doing road rides in the neighborhood of 20 miles at 8mph on a 26" wheel and I want to work to push that up to 10-12mph. I’m not comfortable going faster than I can run out, particulary when I’m coasting. On non bumpy ground my rhythm is pedal fast for a short time then coast until my speed decreases sufficiently then repeat. I use the break to reduce my speed on descents and occasionally as a balance adjustment (particularly if I’m tired or a car is passing me). I use the brake a lot more on bumpy trails. I still have considerably more UPDs than fixed wheel unicyclists which reduces my average speed. I’m also no physical paragon so the Unicon distance records are safe. I do believe the freewheel will provide an advantage given enough practice; it’s just that advantage is over my own fixed wheel riding which is inconsiderable. A different rider would have a greater advantage. I expect to get experience this year riding a 20" single speed 3.8x geared freewheel unicycle as mentioned in this thread and I would love to give your old 3-speed project a spin with the freewheel modification at some point if it could be arranged somehow.
Coming from someone who felt like they were close to taming the beast. This thing was really awesome and I wish I could have taken it home with me.
I can wait to see what crazy awesome modification you manage to come up with in the next two years! I dont know how I would feel about a Freewheeling version of this going at speed more than double of what i was doing…
With so much going on, it was a bit tricky to figure out the best way to control all these things while riding and after some jigging around with the handlebars and bar-ends at Unicon this is what we came up with.
For me, as somebody who rides with my left hand on the seat or bars and with my right arm outstretched for stability, it worked perfect, since I could use my thumb to roll the throttle and the shifter all while maintaining a tight grip on the bar. For people used to holding with the right hand it wasn’t quite as ideal, and some like Martin opted to hold the seat bumper with one hand and then use the other hand on the controls.
Here is a side view of the end result showing the various components that make up the drive. I haven’t talked too much about the electronics here, but in the implementation that was running at Unicon it was setup as a manual torque control device. So the throttle dial on the handlebars sends a signal that directly controls the motor torque via the field-oriented motor controller.
At mid-point, the motor is producing no torque, turn the dial clockwise and it produces a forwards driving torque, and turn it counter clockwise to get a regenerative braking torque. There is no return spring on the throttle dial, so it just stays at whatever value you turn it at. This is nice when you are riding, but it does mean that if you bail with the motor on then the wheel keeps in spinning since I didn’t have any kind of kill switch setup.
Hi Bobby, it was awesome to have you and all the others brave enough to not only take it for a test rides but really figure it out and put it through the paces. So thank you Bobby, Martin, Dave Cox, Thierry, and all the others who had a go and were able to provide useful feedback. The learning curve was not easy, but a handful of people used to geared cokers were able to freemount and ride (somewhat nervously) after just a few tries.
My wife’s ElliptiGO uses a Shimano Alphine 11 hub. You don’t have to be “pedaling” to shift so it’s like a zero learning curve. The Schlumpf on my 36er is jealous.
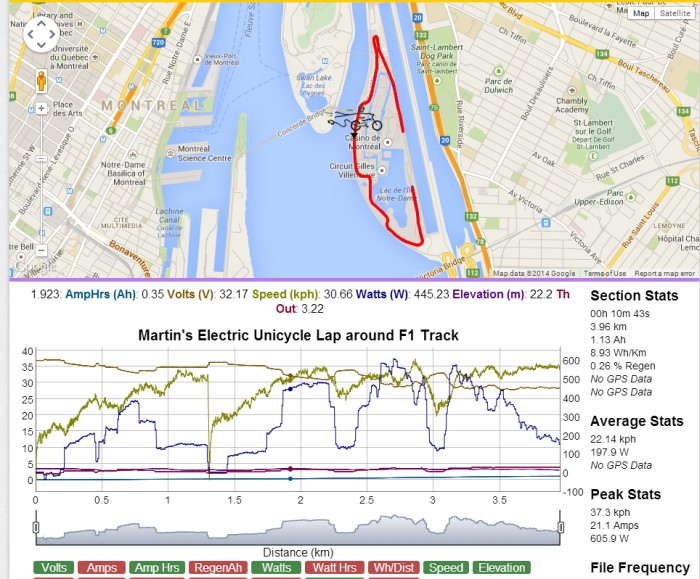
Yes, much more than just time lapse, I actually got full data logging with GPS of the circuit showing all their speeds, cadence, motor power levels etc. at each point in the course. Of course, since both Martin and Bobby had just finished the actual marathon and were more than a little exhausted, it didn’t make for the best test case for setting any speed records. It was also (in martin’s case) his first actual test on the unicycle, while I think it would take quite a few hours of riding to be comfortable enough to really take it at full speed.
Anyways, the data is quite interesting to look at. Here is a look at Martin’s lap, which includes a crash at 1.3km in, and then getting up to speed pretty steadily (~35kph).
Click on it and you will see the lap details and as the mouse hovers over the graph it will show where on the map this corresponds to, as well as all the stats for that point. Over the last km, you can see the battery voltage is at less than 30V, and the motor power steadily drops from ~560 watts to ~160 watts when the file suddenly cuts out. This caused Martin to crash a 2nd time, but it wasn’t until after I looked at the data that I realized why. Turns out that only one of the two small batteries was connected inside the bag, so I only had half the battery capacity I thought was present. This also explains why he didn’t get to the target 40kph speeds, since the battery needs to be at least at 36-37V in order to do that.
Thanks! It wasn’t quite intended like that at the start, but so it became. If you look at this short video from the start of Bobby’s lap, you an see that some cylists on the course were equally mystified by wtf they were seeing:
Here’s another quick clip of me explaining the setup to Martin before he first mounted it:
I’ve got some shaky footage of both their full lapse but am not in a very good spot to edit it all into something nicely viewable right now.
Hey Justin I believe I found a way to make an internal hub that allows the nuvinci to apply force in both directions. Assuming I can get a model of it to you would you be willing to machine it and put it in your rig to see if it works?
You can „ping“ @Justin_LE by adding an @ at the beginning of his user name. He should then get an e-mail notification (unless it‘s possible to turn that option off).