Awesome - so glad to see you made this and impressed at how professional it looks. I just wish I had the sort of engineering facilities you have.
Can you just confirm for me - from previous discussions on this the clutch just allows you to apply back pressure on the pedals, you can’t ride backwards, idle or rollback mount without things locking up? Is the engagement fast enough that it would be a problem if you sometimes have a very slight rollback as part of your static mount?
Hey everyone, just en route back from the Maker Faire where the nuvinci unicycle caused no casualties to riders, spectators, or itself! Actually, there weren’t all that many takers to try riding it but Corbin sure knows how to make it look easy.
Correct. The sprague clutch does a brilliant job of taking up all backlash and with the chain taught there was none of the pedal play that caused a bit of an issue with the S3X build. So a bit +1 on that front.
This, on the other hand, is a bit trick to get used to! At the moment, the chain is geared 34:18 from cranks to the nuvinci, then 28:20 from nuvinci to the hub, or 2.64:1 overall, which equates to an equivalent 64 inch wheel when the nuvinci is in 1:1 mode.
When starting off with nuvinci in easiest gear at 0.5, we have equivalent to a 32 inch wheel rolling forwards and 64 inch when trying to brake, and almost everyone comes off when they hit the 64 inch wheel size trying to slow down.
With a bit of practice you get the hang OK but I was still never that comfortable at low speeds. As the nuvinci is geared up then the fwd/rev torque ratios become closer and this is less of an issue.
Nice work Justin! Taking a welding class to make your own frame, that’s the way to do it. I was talking with Josh from UDC last weekend, he is watching what you’re doing, keep it up and maybe we’ll all be riding Nuvinci hubs one day
Exactly correct. This is one thing that you need to sketch and think about for a while to make sense of, but in a nutshell it works as follows:
1) With the Nuvinci hub at less than a 1:1 ratio, the unicycle rolls forward fine. If you are pushing forwards on the cranks, then it rolls forward via the Nuvinci gear gearing (a 0.5 to 0.99 ratio). If you are rolling forwards but resisting with the cranks, then the torque is transmitted through the one-way clutch at a 1:1 ratio, since the Nuvinci itself freewheels with reverse torque. However, if you try to roll the wheel backwards, it will lock up, as the nuvinci gearing and the one-way clutch will both be engaged but at different ratios.
2) If the Nuvinci is geared higher than 1:1, then the situation is reversed. The unicycle can roll backwards fine but will lock up of you try to roll it forwards. And while rolling backwards, it will be in a 1:1 ratio if you are driving the pedals, and a higher than 1:1 ratio if you are resisting with the pedals.
3) If you were to dial the Nuvinci to be exactly 1:1, then in theory you would be able to roll forwards and backwards and apply torque both ways too with no backlash. With a CVT this is basically impossible to control, it’ll always be just slightly off and you can get in a pedal rotation or two in but it will eventually bind. However with an indexed geared hub like the Shimano Alfine 8 speed which has an exact 1:1 mode, then a it would be possible to flip to a gear for idle/reverse mode, if anyone has the skills to idle or reverse with a >64" wheel size.
This is a great question. When it’s geared down in the ~32" range, the wheel locks almost right away and you don’t have any opportunity for rollback, so it takes some skill to get a forwards only mounting technique. But when it’s geared up closer to 50+ inches, then there is an appreciable rollback before the gears bind, and you can use this as part of a static mount. However, that rollback action puts a greatly amplified force on the clutch and the hub before it binds completely, and it doesn’t feel very healthy.
So if I understand this part correctly, you can only use the hub in forwards motion with the Nuvinci in 0.5 to 0.99 gearing, and not above, so you can’t use the whole 360% gearing that it gives.
Exactly. At first I thought that was more of a downside than it is in reality, as a 2:1 overall ratio already covers more than you really need on a uni. Less than 36" is fairly pointless once you are used to riding big and/or geared wheels, while more than 70" seems at least at this stage at the limit of human control.
But this fact does restrict the choice of other geared hubs we might want to try in a similar application. For instance, the sturney archer 8 speed hubs have a ratio of:
1.000, 1.281, 1.450, 1.644, 1.858, 2.106, 2.384, 3.054
The gears are all above 1:1 so wouldn’t work at all, while the Shimano Alfine 8 speed has ratios of:
0.527, 0.644, 0.748, 0.851, 1.000, 1.223, 1.419, 1.615
So the lower 5 gears would all work, giving close to the same overall span as the Nuvinci in 5 discrete positions.
The Rohloff Speedhub seems best with 11 gears from the 0.279 to 1.000 ratios, so in principle you could do an 11 speed uni with am overall 358% gear range using this. But it’s heavy and bulky like the Nuvinci.
This may be stupid idea but could a similar setup be done with 2 nuvinci hubs. One for forward and one for reverse
If the same cable assembly was used to change both gearings simultaneously could you simply allow the free wheeling in reverse torque but drive the wheel with the other in the same gearing
The problem is ensuring that both hubs have the same gearing. If they are very slightly different, then pedalling in one direction will result in lockup. The cranks drive the hub, the hub drives the wheel, the wheel drives the other hub, the other hub drives the cranks - if the hub driving the wheel has higher gearing, then the hub driving the cranks will attempt to turn them faster than they’re going (remember that the reverse direction hub is acting in a similar way to what happens when pushing a bike backwards - it makes the cranks turn, with the freewheel only kicking in if the cranks are turning faster than the hub wants to turn them).
Would it be more feasible with one of the other internal hubs such as rolhoff speed hub.
Although 1 speed hub on a uni would be heavy and expensive, 2 would be crazy,
But for 11 gears and 300% variation, might be interesting
This was actually my initial plan for the project. To prevent lockup when rolling forwards you would just have to preset the hub transmitting forwards torque to always have a slightly lower gear ratio than the hub doing reverse torque. The main downside to this approach with two Nuvinci’s is that it would be huge and heavy.
With a pair of lighter and smaller indexed hubs it might be feasible though. To prevent lock-ups during the gear transition in this case you’d probably need to stagger the shifting. So on up-ship you would change the reverse torque hub first and then the forwards torque hub 2nd, while on down-shifting it would be the opposite sequence. I’m sure with some clever tinkering you could do this with a single shift mechanism which would be slick.
I know this must have come up before, but can you modify a single hub to take reverse torque? I understand why is does not work with the nuvinci hubs (they are pre-loaded in one direction only) but I do not really understand the design of the other shifting hubs.
Well, in the last 2 years this project hasn’t sat totally idle, I converted it back to a 3 speed drive instead of the Nuvinci CVT for Unicon16 in Italy, and then restored it to have have the Nuvinci along with shifters and a hub motor for the San Mateo maker faire in 2013. And then did a few more upgrades in time for Unicon17 last week where it got to finally see some good action!
One of the big problems facing the original build was this:
The Nuvinci hub I used in this project was from their now discontinued N171 developer kit http://www.nuvinci.com/09_lev_kit.asp
which included a stepper motor drive electronic shifter that I was planning to use, but whole shifting assembly was massive and ugly and as a result was not installed.
I was going to then use the standard handlebar twist shifter instead, but realized that the shaft on the N171 from the developer kit is a share, while the shaft for the regular N171 nuvinci hub with manual shifting is a splined star shape.
It turns out it is more than just the shaft interface that is different, the electronic shifter shaft has a much finer pitch lead screw than the manual shifter, meaning that it takes twice as many turns in order to fully shift from low to high gear. This was probably done to reduce the motor torque needed for the electric shifting.
If the handlebar shifter was used on the developer kit N171 it would only be able to move through half the total gear range. Normally that wouldn’t be desirable, but in my case I can only use the bottom half (from 0.5:1 to 1:1 ratio) of the Nuvinci’s range. If the gear is shifted past the 1:1 ratio, then the wheel locks up in the forwards direction which isn’t good.
So, by filing the mechanical shifter cable drum to fit over the square shaft, I ended up not only getting the desired handlebar shifting, but did so in a way that also intrinsically prevents the user from ever being able to shift beyond the 1:1 point and crashing.
I added a couple of steel tubes as a bash guard so that the shifting mechanism is protected in the event of a crash and so far it has been working perfectly.
The original build had a simple freewheeling hub made from a 20mm thru axle front bike hub with a square taper axle going through it (see posts# 20-23).
One of the things I was really curious about is the concept of using a motor to generate the reverse torque rather than using a mechanical transmission for it. So much complication with the variable speed geared unicycle is the requirement for a bidirectional torque transmission, since all the internal bike hubs are unidirectional and freewheel in reverse.
In principle, you could have a torque sensor that detects when the rider is attempting to put backwards pressure on the cranks and immediately have the motor engage in a regenerative braking mode, which would cause the rider to then resume forwards pressure on the cranks to stay balanced. If it’s possible in this way to use the motor so that the rider is always modulating and maintaining forwards pressure on the cranks, then that would open up the possibility of using any hub gear or even derailleur gears for a multi-speed unicycle.
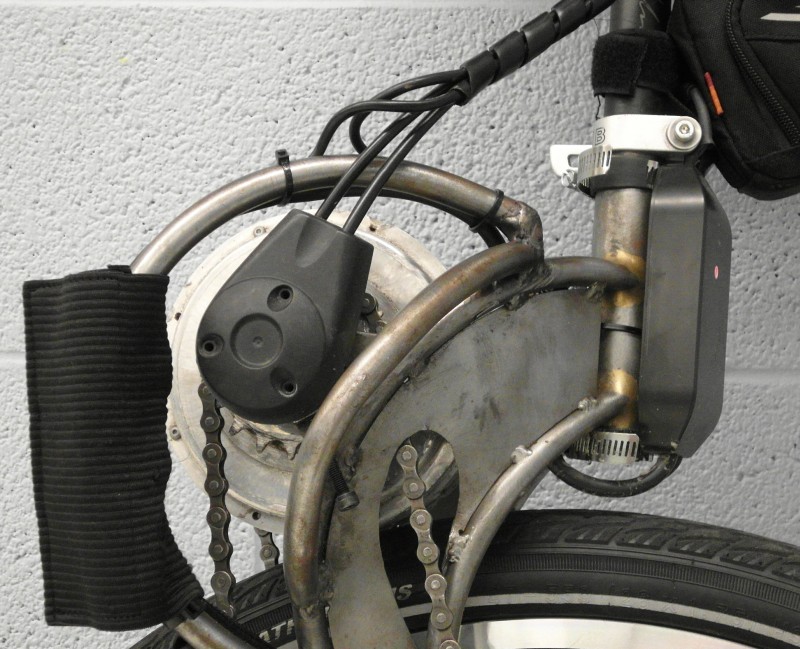
So, the simple hub was replaced with a hub motor design not unlike a much earlier build described here:
Only this time, the spindle stayed completely decoupled from the motor rotor, so that they could be linked via the external chaindrive transmission.
Here are a few additional pictures of the motorized wheel. The left side had a fixed non-rotating 42mm shaft which is coupled to the motor stator and has the motor wires coming out, while the right side has a 30t chain sprocket bolted to the disk holes on the motor cover plate. The right side axle is on a standard unicycle bearing. The square taper spindle itself came from taking apart an extra long (156mm) bicycle bottom bracket.
Another thing I learned from these chain drive experiments is the need for a chain tensioner and idler in order to prevent the chain from popping off when the unicycle is under significant stress. In this build though, the idler serves several other purposes too. Two magnets are fit in the housing and wired up a bicycle cadence sensor so that the speed of the chain travel and hence the rider’s pedal cadence can be accurately measured. With the 10t idler and a 48T chainring on the right, there are exactly 9.6 magnetic pulses per pedal revolution
The aluminum mount for the idler can slide back and forth to set the chain tension, and it also has strain gauges glued on the top and bottom surfaces which enables it to measure the chain tension and hence the rider’s pedal torque. With both the torque and cadence, we can record the actual human watts output of the rider. Unfortunately this ended up getting permanently bent at one point in unicon which caused the strain sensors to be saturated, so I wasn’t able to measure and make use of rider’s pedal torque this time around.
This is such a fantastic project! Congratulations on such a successful implementation and all your hard work! I saw your objet d’art at Unicon but hesitated to try it since I tend to be crashy. Have you considered a freewheel version? There are a few of us out there putting decent mileage on such unicycles.