For those not familiar with some previous antics, I’ve got a long standing dream of building up a unicycle that I can commute on as fast and as comfortably as riding an ebike. This started with trying to add electric assist to a unicycle, first in a penguin giraffe (circa 2006 Emanual Project ) then to much better success using a direct drive hub motor modified for cranks to go through the middle, which culminated here with very good success
Electric Assist Unicycle Build | Endless Sphere DIY EV Forum
Electric Assist Unicycle at Maker Faire, this Sat. and Sunday
The downside with that build was that it wasn’t geared, so you couldn’t take advantage of the motor much except when going up and down steep hills. That lead to a path of seeing if there wasn’t an easy way to use bicycle hub gears to make a shiftable multi-speed unicycle that could gear the pedals to cruise at 30-40 kph where the electric assist really makes a difference.
This started with the 3 speed Sturney Archer unicycle which worked well enough in principle but in practice had too much backslash and risk of chain skipping to be comfortably rideable:
To the then way more elaborate endeavor of using a Nuvinci CVT transmission which some of you may have seen around at Unicon 17 in Montreal
You can read that thread in full to see all of the challenges and difficulties with the build, and you can see how mechanically things got pretty out of hand. External jackshafts transmissions are not a very good solution.
That made my long for the simplicity of a simple hub motor build just wishing that I had a Schlumpf inside it. What I realized quite a while ago though is that with electric assist, in you don’t really need variable speeds, just a single speed that is geared in the 50-70" realm would be fine and then the motor can look after the extra torque requirements for hill climbing and accelerating from a standstill.
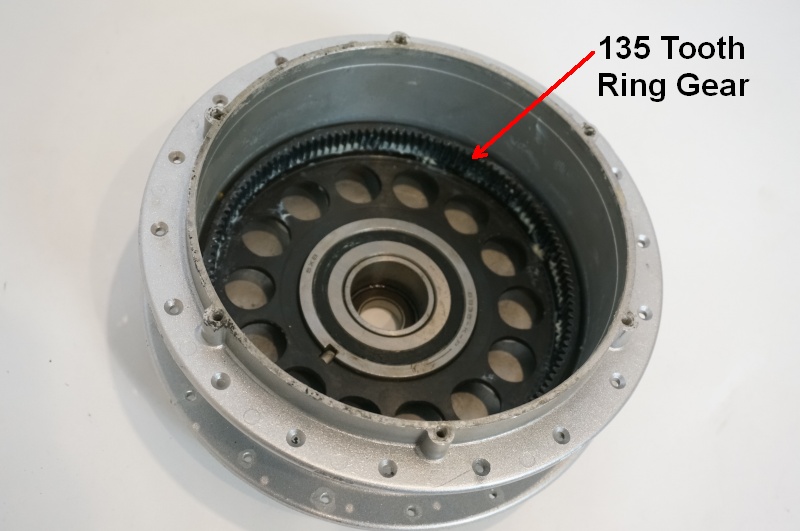
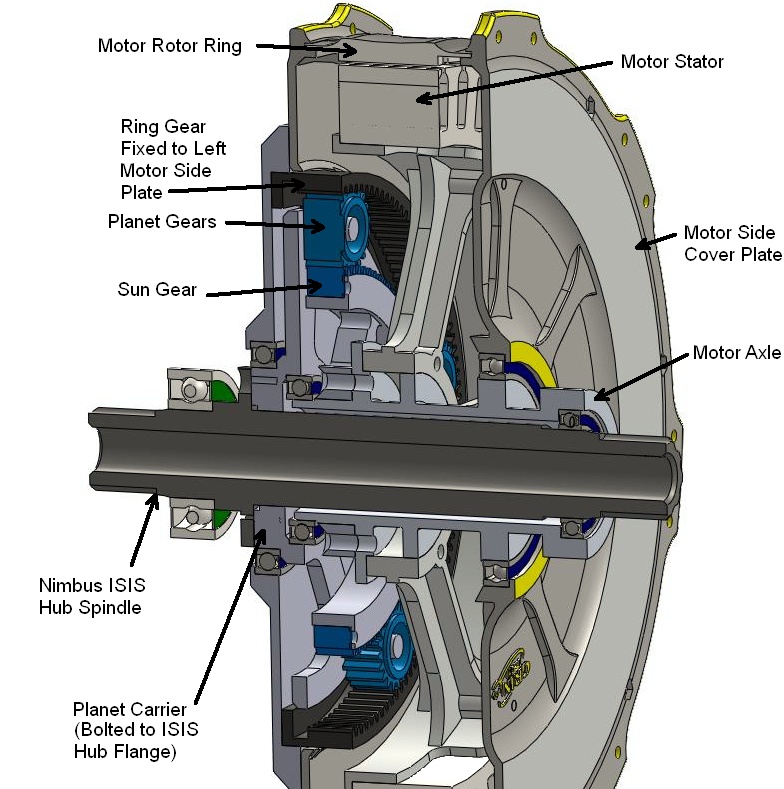
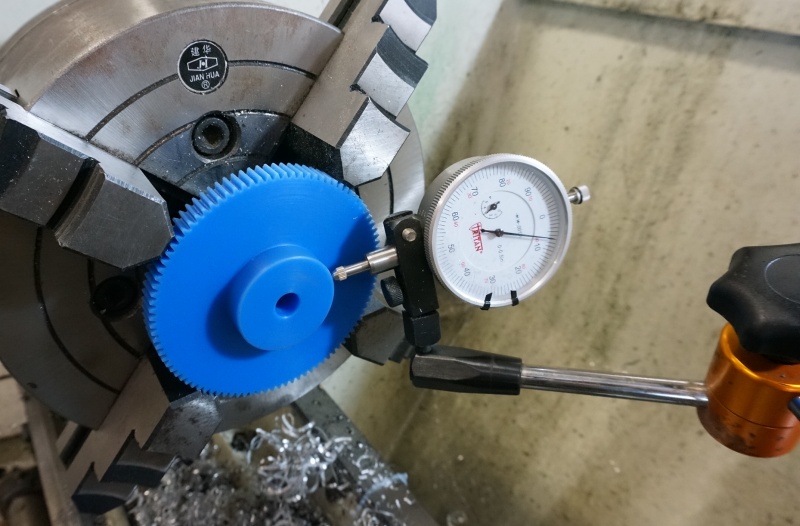
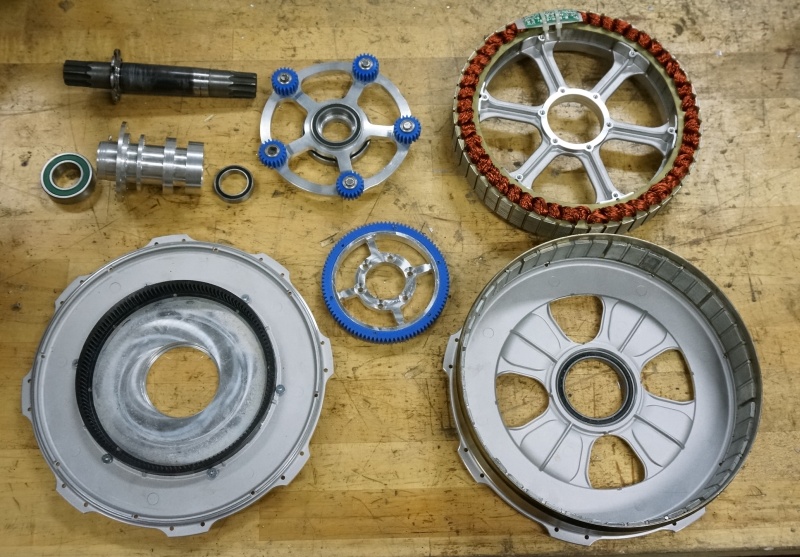
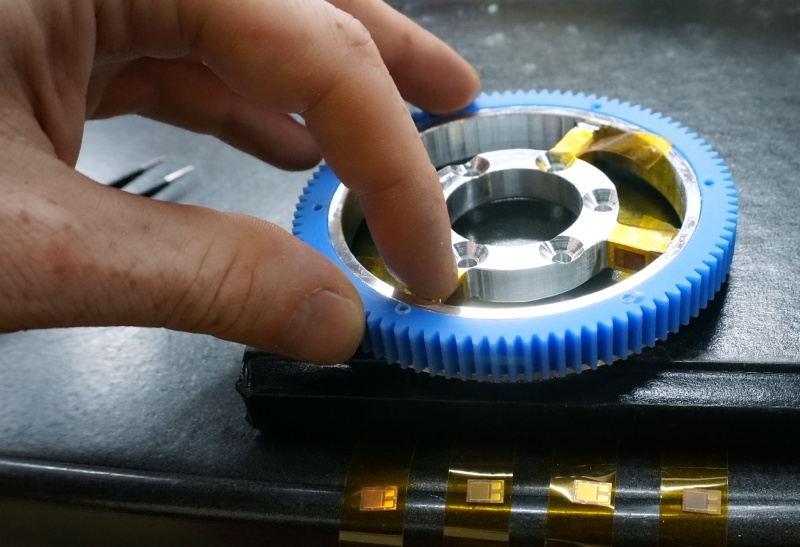
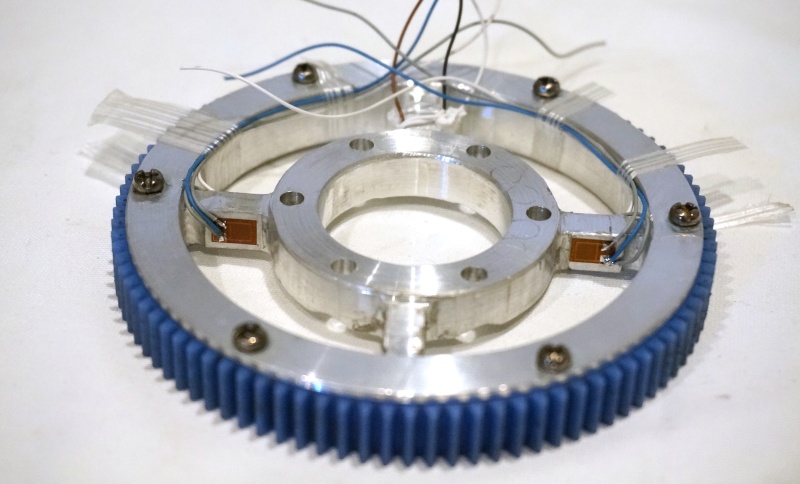
Unfortunately the timing didn’t work to get any Schlumpf gearing parts from Florian before the upcoming Unicon, but I was lucky that in my random old ebike parts bin I had a motor with a 135 tooth ring gear along with some 90 tooth and 20 tooth nylon spur gears I had bought some time ago for an experiment. In theory, that could lead to a planetary gear with a 1 + 95/135 or 174% gear ratio, even more than the Schlumpf hubs at 155%.
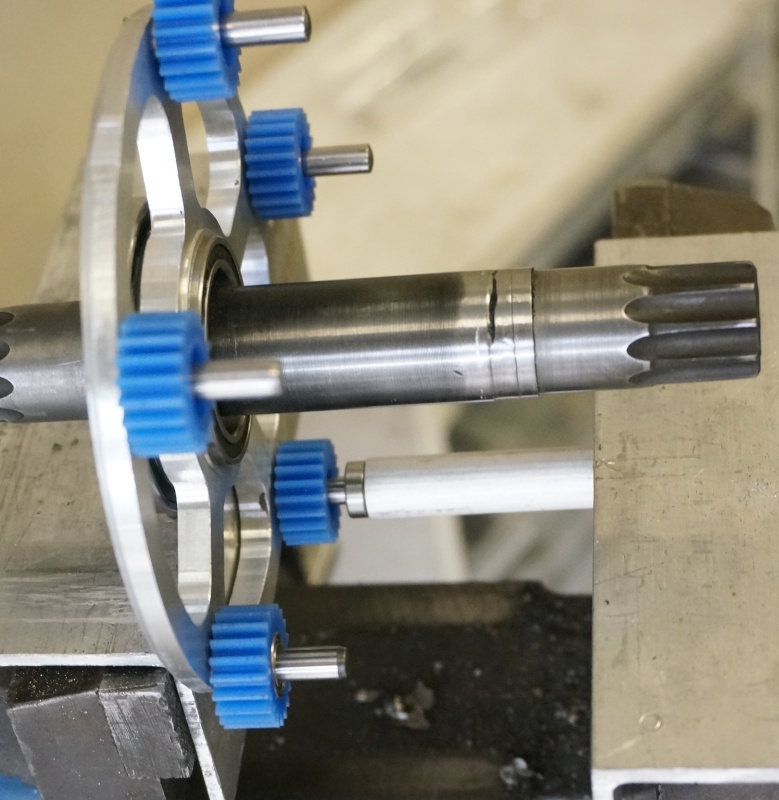
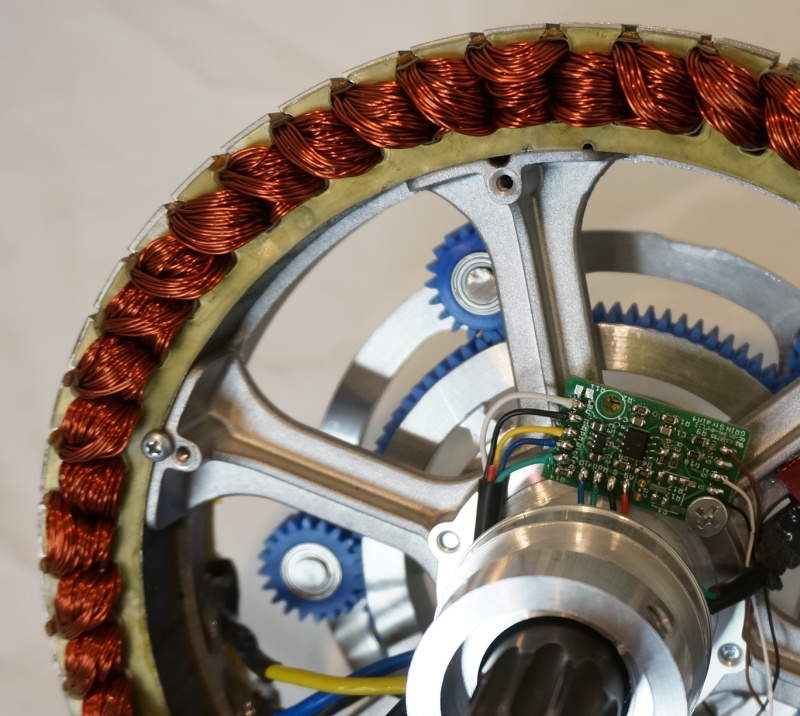
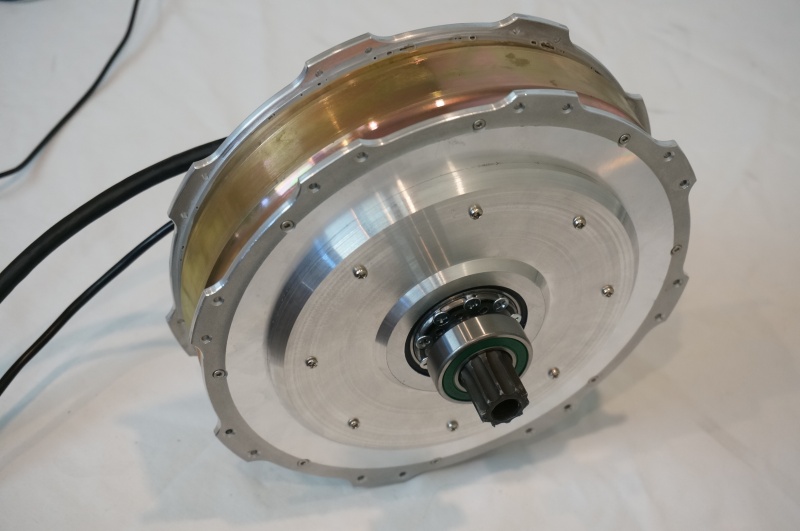
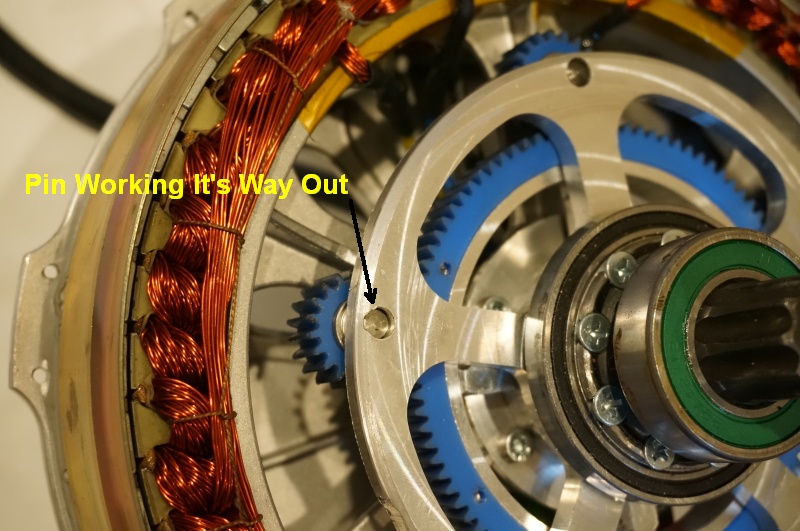
So the question, could I use this as the basis for a hub motor electric unicycle that has fixed internal gearing so that everything is clean and tidy in the hub, and can I get this built and tested before we fly out to Unicon 18 at the end of this week?