I’ve had a look at the duvinci hub and the specification says it has a range of0.5 underdrive to 1.75 overdrive.on a 26" unicycle that would give you the equivelant of 13" wheel through to a 45.5" wheel surely enough to satisfy anyone.To be adapted for a unicycle you would have to replace the axle with a hardened crank axle shaft,the input has to be driven by the crank shaft and the gear ratio changer mechanism would have to be re-engineered to exit inboard of the the crank ends.Without having seen one of these hubs in the flesh I doubt it would be possible to carry out these mods however if they decide to cater to unicycles I’m sure they could produce a unicycle version without too much trouble.I want one.
my only question when it comes to the nuvinci hub is: can we get rid of free wheel?
if ok then I think we can do something with it without many changes.
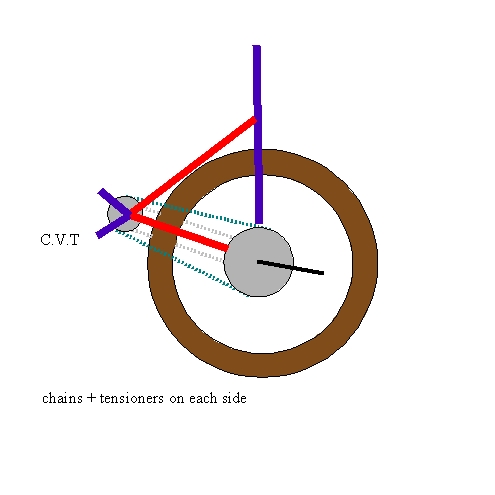
here is what I had in mind: based on Pete Peron’s initial idea except that the chains are on each side of the frame and that the secondary axle is further off.
In that case a slightly modified CVT could be used provided that the free-wheel is off.
for sure it is not that simple but this sketch is to illustrate the general idea I had had in mind for 2 years (but unable to find someone to build a model - a model because I suspect there are some problems with this design-).
wobbling bear the freewheel on the duvinci hub is part of the sprocket carrier like you would find on a derailier type hub so that is easily solved.your design will work but the more components you use the heavier and more complex it becomes also chain drive should be avoided if possible due to maintainance issues.
yep but what I want is a XC machine to dash through forrest trails (not for trialsy things) … So I will be ready to accept the weight penalty (and get ready to fix chains again and again). I am more worried about influence of gear change on balance.
It weighs 4kg, which at that offset would be horrible. Surely it’d make more sense to have it in between the legs of the frame, above the wheel? Assuming you’re thinking a 26" wheel, there’d be loads of room if you used a 36" frame.
Joe
you mean the CVT weighs 4 kg!!!? (I was not aware of that ![]() )
)
Without this consideration there is a reason why I wanted to experiment with a different location: I am afraid of balance problems if the secondary axle is vertically aligned with the main axle … But I may be completely wrong!
you are right I am thinking of a 26" wheel. So brainstorming and experiments are welcome!
Weight from
http://www.fallbrooktech.com/NuVinci_Experience.pdf
It’s much easier to balance with a heavy weight on the line of the frame than if you have a weight off axis, or at least it is if it’s luggage strapped to the unicycle, I’d assume the same to be true for this.
Joe
I see … IMHO 4kg is too much for a CVT on a unicycle. (that makes at least a 11kg unicycle … well My Old fashioned Coker weighs around that … but …)
other options?
wobbling bear, the freewheel is screwed onto the NuVinci hub. The hub itself is already set up for fixed gear apps, and can operate in both directions.
dangerdog, the necessary axle mods are more complex than appear. If it were possible, this hub would have been modded for unis by now.
But it is possible. All I said earlier was that it will take resources (money & metal) to modify the existing design.
I agree it would be near impossible to modify but I hope a manufacturer takes up the challenge.I hope it happens because even allowing for some frictional losses in the gears it would balance out by its ability to be in the right gear for any given terrain or energy output and most importantly the ability to go very fast.
I haven’t tried a Guni, but I think the shifting would be hard to get used to and very difficult, or impossible, in technical terrain. Anything to smooth this out would be good.
Joe - I think a weight attatched to the uni would only cause big problems if it were loose (as in lugage). If it was a rigid part of the uni I think it would only affect climbing and hoping, but if it were where WB put it in his drawing stearing response would be very slow or more stable, depending on how you see it, but would likely get destroyed from UPD’s.:o
4 kg. is a lot of weight I’d hesitate a lot before getting a uni that was just that much heavier.
right: that’s why in a more precise sketch it is protected by bars (they are shown in the picture).
My idea for experiment is to build a very heavy stupid thing where paramaters such as the angle and the position of the secondary axle could be changed. I suspect that there are many balance parameters that change due to “parasitic” forces.
I think that CVT is the way to go : now there should be competing designs and experiments between co-axial or secondary axle.
Found a post that describes that the NuVinic is optimized for forward and would tend to slip in reverse, so not as simple as removing the freewheel.
I decided to post the contents of your link for those to lazy to click on it (like I am sometimes)
Looks like the basic design would still work but a unicycle version with a static clamping force would have more resistance and a shorter life. Still I think it is most definitely doable.
CVT still undercover?
no way to understand how this should work : http://www.iodupont.com/infinitydrive.php
but I’ll be interested
i want to try a unicyle with a free wheel. who cares about going backwards, i want to coast. it would be best on touring unis
The guy talks about it being like an “extremely gummed up freewheel”
- that would probably be all you’d need to balance a unicycle. All you need is enough slowing force when freewheeling to stop you falling off the back. Combine that with a brake and this could probably be made to work.
Good spotting Wobbling bear,the details are a little vague but they appear to be promising gear utopia,time will tell.
john
So, couldn’t one take a system like this and add some drag to the freewheeling action?
Wouldn’t the relative offset to the forward momentum be enough to maintain balance?